









Описание
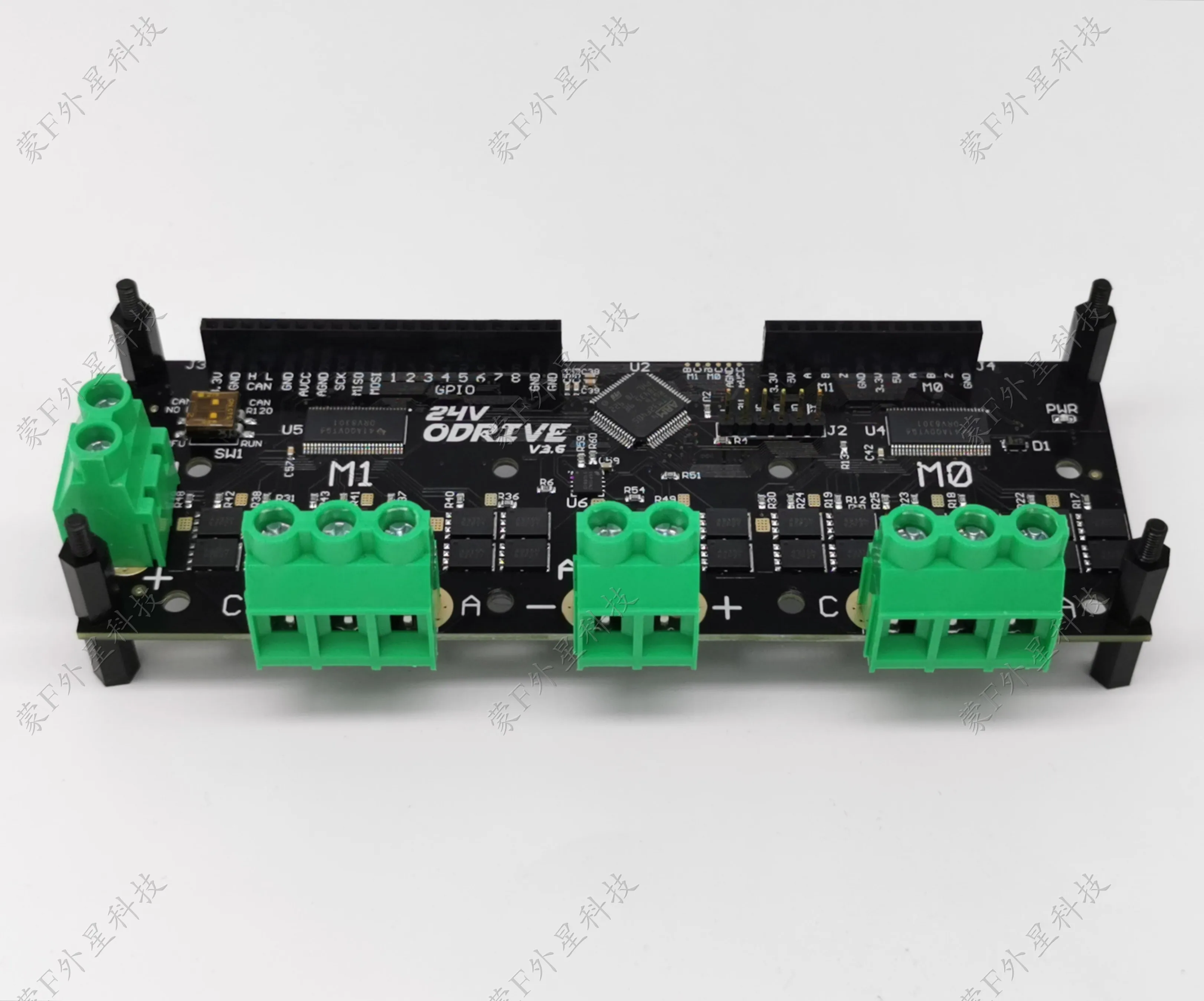
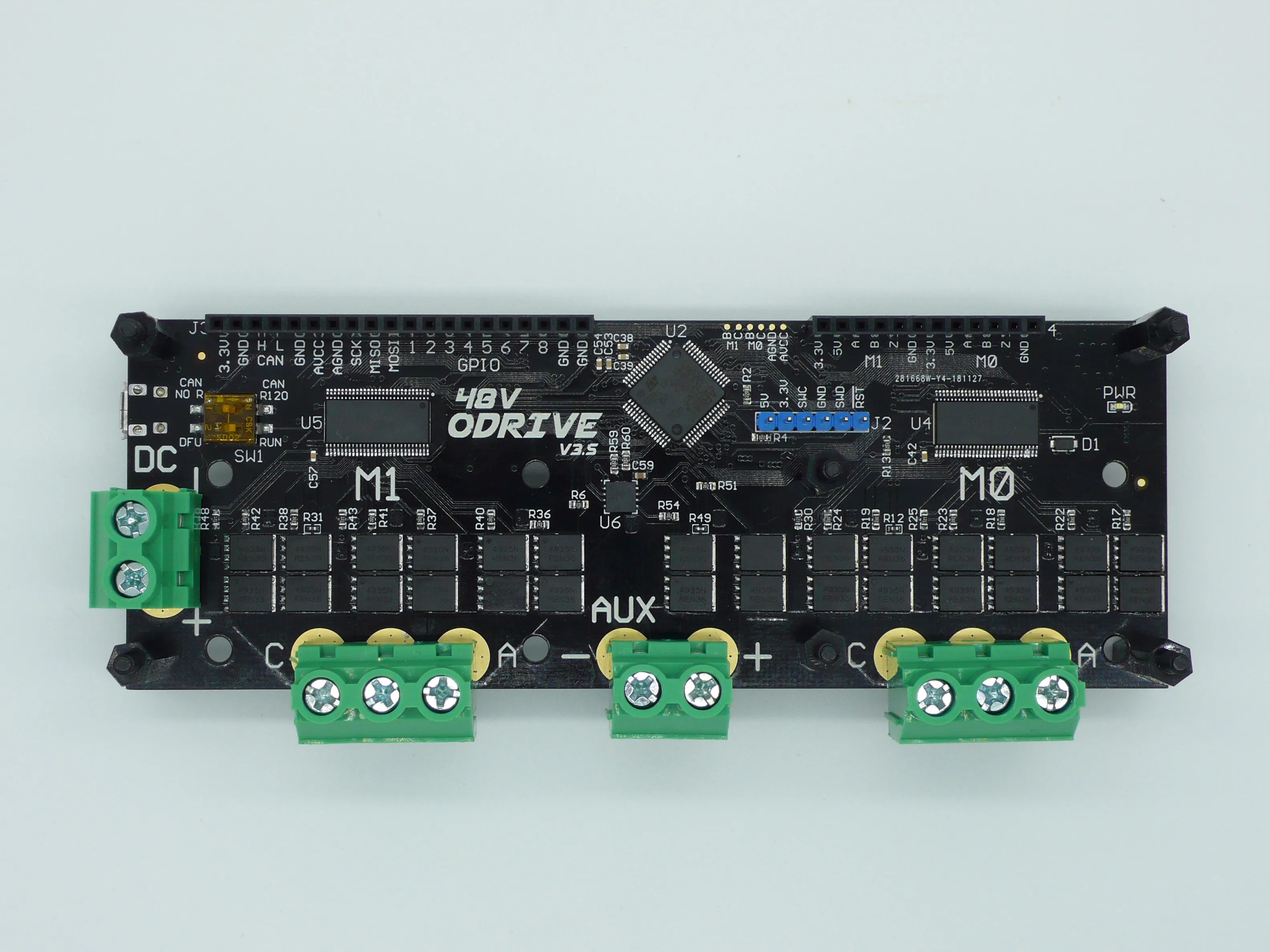
ODriveHardware upgradeV3.5 V3.6VersionPCBFour-layer wiring2Ounce4 layer gold plate
Три кольца управления:Скорость, расположение, ток
ODrive V3.5Version 24 V 48 V
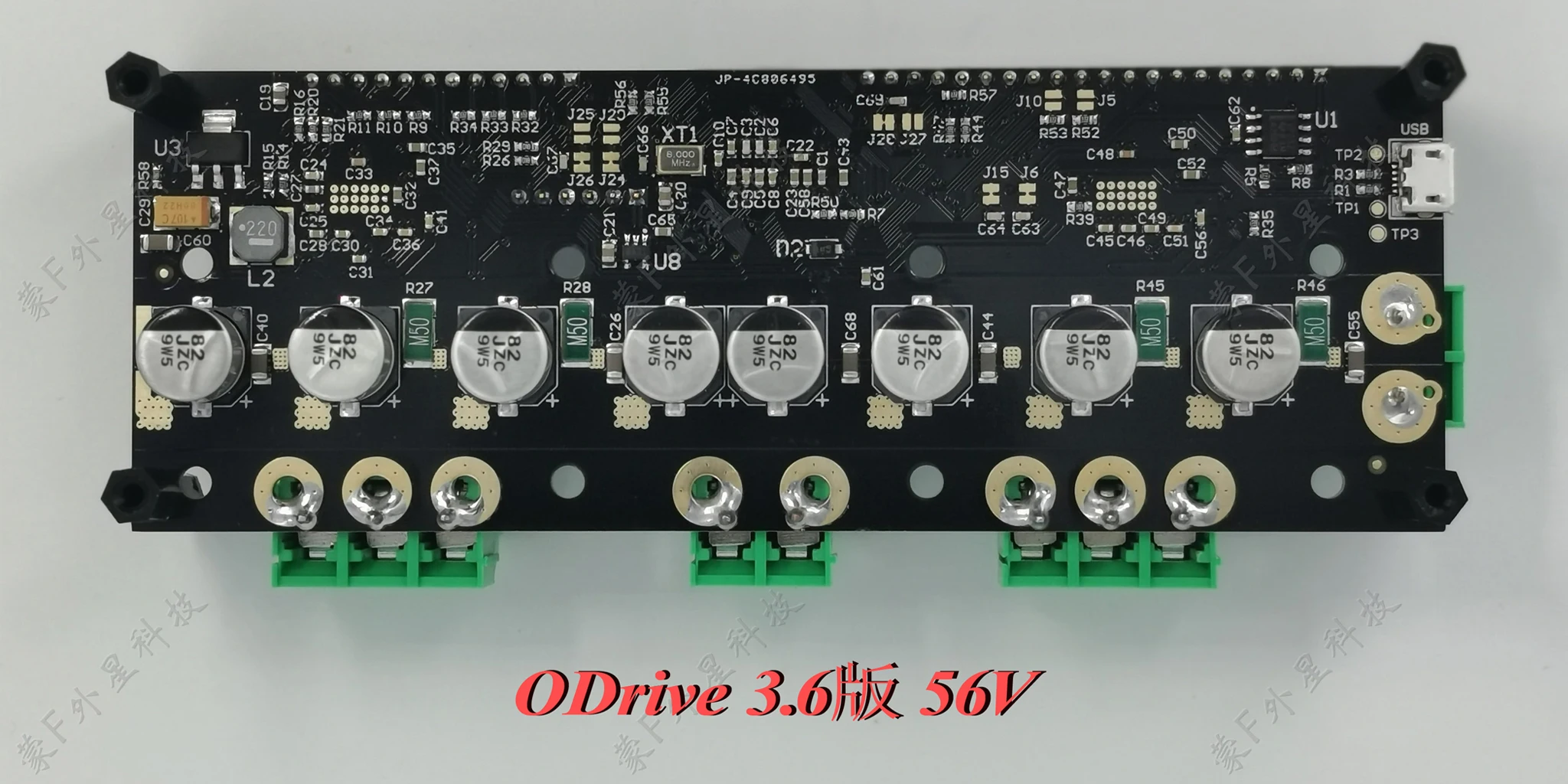
ODrive V3.6Version 24 V 56вODriveПрошивка горения хороший тест хорошая доставка 。 с сопротивлением мощности
Описание: 56вАппаратные силовые трубки импортируютсяNTMFS5C612N60 V 235A 1.5m ΩUltra-Низкое внутреннее resistanceNChannelMOSFETTubeУвеличенная нагрузка падение низкая температура+Супер дорогоPanasonicПолимерКонденсаторный двигатель работает более плавно.
Загрузка данных: https://pan.baidu.com/s/1PSq2Aw5WiMFYGk0rPBw7Ag






Перевод выглядит следующим образом:
Этот пункт о точном приводе бесщеточный мотор, дешевая цена. Его цель-использовать дешевый бесщеточный мотор s в высокопроизводительных роботов проектов
Начало работы
Начните Тестирование с одного двигателя и энкодера, никаких проблем, даже рекомендуется. обеспечивает хорошее механическое соединение между кодировщиком и двигателем, скольжение может привести к аварийным колебаниям. все немощные/OAll are3.3VOutput и 5vinput допуск, за исключением: InODrive v3.2и более ранние версии, GPIO 3 AndGPIO 4 не поддерживает напряжение 5v。 вам нужен один или два бесщеточных мотора, Ортогональный инкрементный энкодер и сопротивление мощности. значение сопротивления мощности, которое вам нужно, зависит от вашего Настройки двигателя и пики/Средняя мощность смещения 。 хорошая отправная точка a0.47 Ом, 50 Вт подключите электродвигатель phase3Phase винтовой терминал, и подключите Силовой Резистор. блок питания (12-24 В) подключен к DCDCTerminal, убедитесь, что обратите внимание на полярность. не применяйте электричество сейчас. подключите encoderJ4 。 a, BStage требуется, Z (индекс пульса) опционально 。 a, BAndZLine has3.3kUpper сопротивление тяги, для слива открытого энкодера выход 。 слабый движущийся ток (<4 мА) одноконцевый сигнал push-pull, вам может потребоваться снять подтягивающий сигнал Резистор 。
Если команда passUSBSend, кабель может быть встроен Micro-USBPort. Если команда passUARTSend, см. settingsUART, если вы используете шаг/DIR, см. settingsSTEP/DIR
Теперь вы можете: скачать и построить прошивку настройка параметров прошивки щетка прошивки на печатную плату Запуск программы
Пусковое устройство показывает здесь.
Примечание: ротор должен быть повернут во время запуска, без смещения нагрузки. это означает, что качество и слабые фрикционные нагрузки очень хороши, но Гравитация или пружинная нагрузка не хороши. пожалуйста, обратите внимание, что в видео мотор вращается после инициализации, но в текущем по, по умолчанию, режим установки управления позицией в положение 0 (то есть положение при запуске)
Если у вас есть кодировщик указателя (Z) сигнала, вы можете откалибровать один раз и продолжить калибровку при запуске. Инструкции по тому, как это сделать, здесь.
Отправьте команду
Запись отправки hereUSBAndUARTCommand. Вы также можете увидеть ArduinoLibrary, он может быть использован easilyArduinoOnUARTInterface. Вы также можете увидеть его как passuartwithodriveпример осуществления связи.
SettingsUART
Скорость передачи: 115200Pin распределение:
GPIO 1: Tx (подключен к другим devicesRx)
GPIO 2: Rx (подключен к другим devicesTx)
GND: необходимо соединить Заземляющий Провод устройства вместе. UseODriveOfJ3Any onGNDPin.
Для beGPIOEnableUARTMode см. Settingsgpiomod 。
SettingsSTEP/Дир
Pin-код:
GPIO 1: шаг M0
GPIO 2: M0 DIR
GPIO 3: шаг M1
GPIO 4: M1 DIR
GND: необходимо соединить Заземляющий Провод устройства вместе. UseODriveOfJ3Any onGNDPin.
Пожалуйста, обратите внимание, GPIO_3AndGPIO_4InODrive v3.2и не допускается на уровне нижней версии 5v, So3.3VSignal! ODrive v3.3и выше версия has5vtoleregpiopin 。
Для enableGPIOOfstep/dirMode см. Settingsgpiomod.
Другой является переменной конфигурации calledcounts_per_stepNew, она определяет «размер шага», соответствующее количество кодировщиков. это может быть любое значение плавающей точки. шаг скорости ждёт тестирования, но он должен иметь дело с least16kHz 。 если вы хотите проверить его, пожалуйста, обратите внимание, что режим сбоя при слишком высоком шаговом режиме должен быть выключением двигателя и рулем.
Пожалуйста, обратите внимание, Линия не включена сейчас, и интерфейс шагового/направления включен по умолчанию, и как режим управления положения longODriveIn, он остается активным. по умолчанию, ODriveStart в режиме управления позициями, так что вам не нужно passUSBSend любую команду для запуска. если вы хотите, вы все еще можете sendUSBCommand 。
Получите помощь, если у вас есть какие-либо вопросы или какие-либо вопросы, пожалуйста, свяжитесь с нами.
Пожалуйста, обратите внимание,Использование бортового теплового сопротивления r12, R31, R48MeasurementOdrive mosfetemperature rise, Помогает быть в безопасности.
Смотрите официальный веб-сайт:
Https://discourse.odriverobotics.com/t/odrive-mosfet-temperature-rise-measurements-using-the-onboard-thermistor/972


ODriveOpen source разработан enthusiastsUI odrivetoolInterface
GitLib: https://gitlab.com/p87942130/ui_odrivetool
Видео: https://vimeo.com/318632945
Другая информация на сетевом диске Baidu выше этой страницы продукта, пожалуйста, обратите внимание на непрерывное улучшение
Комплементарные товары


![[V3.6b] ODrive-вок с одной осью высокопроизводительный Высокоточный бесщеточный мотор BLDC](https://ae01.alicdn.com/kf/H4c8f10851a034035ba5ad7b62867d05ca.jpg_220x220xz.jpg)






