



Описание
С открытым исходным кодом соматосенсорная рука ладонь палец пульт дистанционного управления робот DIY носимые механические перчатки Беспроводное управление Лер Exoskeleton
Введение
1). Механические перчатки с открытым исходным кодом на основе Arduino;
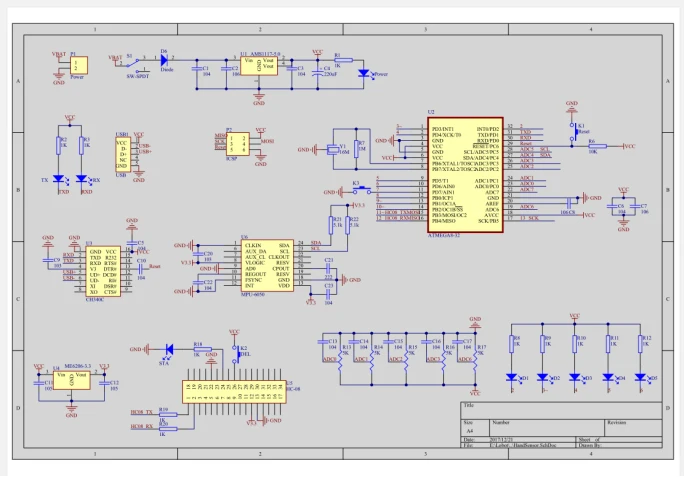
2). Открыть схему и исходный код;
3) Встроенный модуль Bluetooth 4,0 и датчик ускорения;
4) обеспечивают контроль, который может контролировать продукт руки робота, бионического робота, автомобиля и так далее.
Примечание: Этот продукт является продуктом дистанционного управления используется непосредственно для управления роботом, не подключен к компьютеру и мобильному телефону, Bluetooth, который соответствует перчатке, должен быть HC-08 моделью.
Описание продукта:
Arduino на основе соматосенсорных механических перчаток с открытым исходным кодом;
Открытые схемы и исходный код;
Встроенный модуль Bluetooth 4,0 и датчик ускорения;
Обеспечить большое количество процедур управления, которые могут управлять роботом ладони, Роботизированной рукой, бионическим роботом, умным автомобилем
Параметры продукта:
Микроконтроллер Модель: Arduino
Батарея: 7,4 V 2 S lipo-батарея (встроенная)
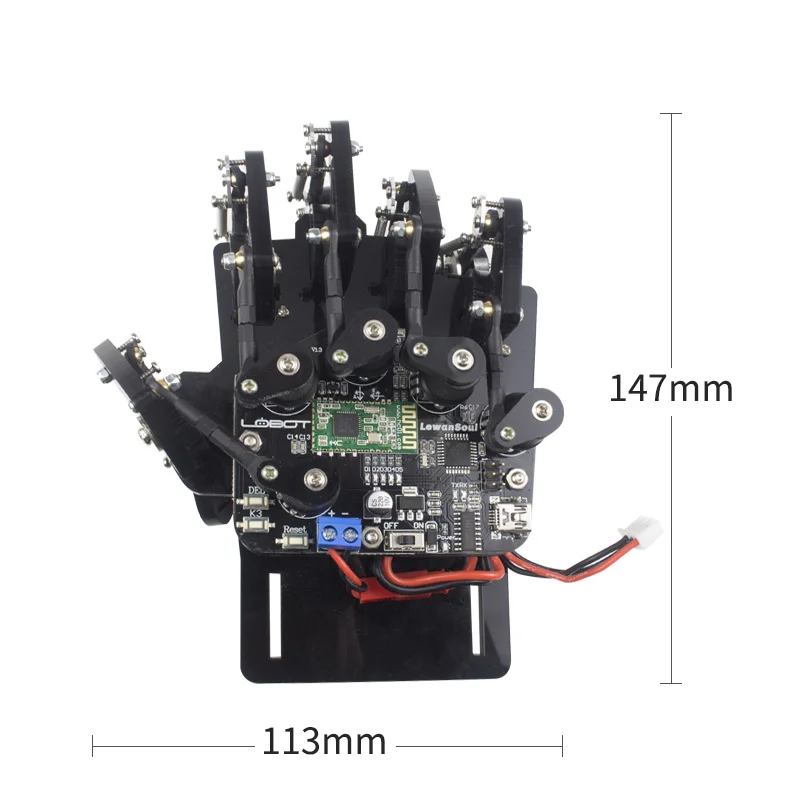
Размер: 147 мм x 113 мм
Вес: 0,26 кг
Посылка список:
Соматосенсорные перчатки с открытым исходным кодом * 1 комплект
Зарядное устройство * 1
Кабель USB * 1
Электронный файл данных * 1






Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Бренд
- jongkhurun
- Номер модели
- Robot
- Габаритные размеры
- Hand Palm
- Характеристики
- Сборка
- Колесная база
- Screws
- Технические характеристики
- Значение 2
- Расходный материал для инструментов
- Сборное стекло
- Тип транспорта
- Самолеты
- Периферийные устройства для дистанционного управления
- Wearable Mechanical Glove
- Детали для тюнинга и запчасти
- Hand Palm Finger Remote Control Robot
- Детали дистанционного управления и комплектующие
- Open Source Somatosensory
- Материал
- Robot
Комплементарные товары

