
Описание
Поддержка для этого suiteBLDC, PMSM, внутренний ротор, различные бесщеточный двигатель постоянного тока с внешним ротором




\
\









Параметры мощности ведущего двигателя:
Номинальное входное напряжение:DC 24 V;
Номинальная мощность:1000 W;
Входное напряжение:DC 45 V;
Рабочий ток:10A, Мгновенная возможность переимпульсного тока:33A(В зависимости от выбораMOSТрубка)
Выбор драйвера: IR2101S + IRF540N
Входное напряжение тока поддерживает постоянный ток15-400 В, Нужен контакт с клиентами.
Управляющая плата функция:
Поддержка входа датчика Холла, поддержка ввода ABencoder, поддержка бесчувственного запуска (получение нулевой точки пересечения обратного EMF)
Поддержка защиты от перенапряжения, защита от пониженного напряжения, защита от перегрузки по току, защита от перегрева
Supportfocalgoritm, три сопротивления выборки, одиночное сопротивление выборки
Поддержка обнаружения напряжения шины, обнаружение тока шины, обнаружение перегрузки по току шины (разрыв) в соответствии с промышленными приложениями.
Дизайн выборки высокого тока для платы водителя, дизайн пайки оловянного слоя в силовой части
Плата развития двигателя SupportPIDOnline регулировка, удобная разработка привода двигателя
Алгоритм ускорения лестницы и замедления для управления движением, спорт более плавный и безударный
Предоставьте протокол последовательного порта для отправки инструкций по позициям для контроля положения двигателя на месте, вы также можете просмотреть текущее местоположение.
Заявление: этот набор данных и процедур относится к Объединенному контрольному интеллекту, ни один или любая единица не может продавать без разрешения, после того, как они будут обнаружены, они будут накажены по законам, лишение технических услуг.
Многие клиенты покупали платы., но многие люди задают мне эти вопросы., позвольте мне подвести итог., обеспечить удобство для разработки бесщеточного привода двигателя
1.Где инженерные документы?
2.Как открыть инженерные документы
3.Мотор не был куплен мной., как повернуть ваши двигатели
4.Как скачать программы, на вашу плату
5.Как сделать двигатель более плавным
6.Как настроить кольцо скорости и кольцо моментаPID
7.Я начала с включения моторов Холла как повернуть моторы кодера или двигатели без индукции
8.Как настроить параметры пуска, вращающийся Бессенсорный бесщеточный мотор (почти многие клиенты задают этот вопрос., специальное описание)
9. Получите новый мотор и не знаете, как быстро определить параметры двигателя., поделитесь (очень практично)
Подытожим некоторые вопросы, ответы поочередно, в документ будут подытожены вопросы по последующим мерам,Инженеры заинтересованы в разработке бесщеточного двигателя
Более быстрое овладение этой технологией, разработайте свой собственный бесщеточный мотор.
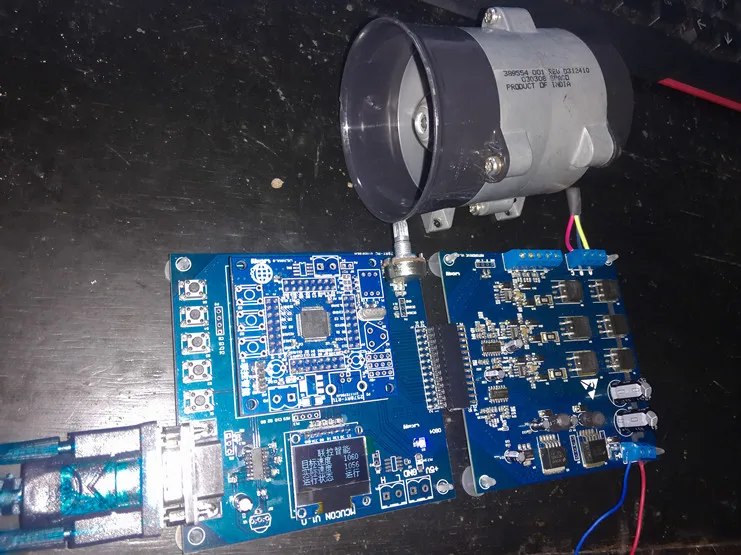
Движимый люксВысокоскоростной турбинный вентилятор :( фактический проект)Индукционный векторный синусоидальный привод


Для того, чтобы клиенты могли вкладывать больше средств в развитие, сочетая в себе вопросы клиентов и проблемы, возникшие в процессе разработки, поясняйте программы, четкое понимание потока процесса.

Синус вектор алгоритмыНет чувстваДемонстрация:
FOC2.0 (большой крутящий момент, запуск плавно, без воздействия, подходит для различных приложений проекта, вентилятор, компрессор насос балансировки транспортного средства и т. Д.)
Демонстрация запуска бесщеточного двигателя без индукции (FOC4.2) синусоидальный вектор:
Синус вектор алгоритмыНа ощупьДемонстрация:
FOC4.2Demonstration
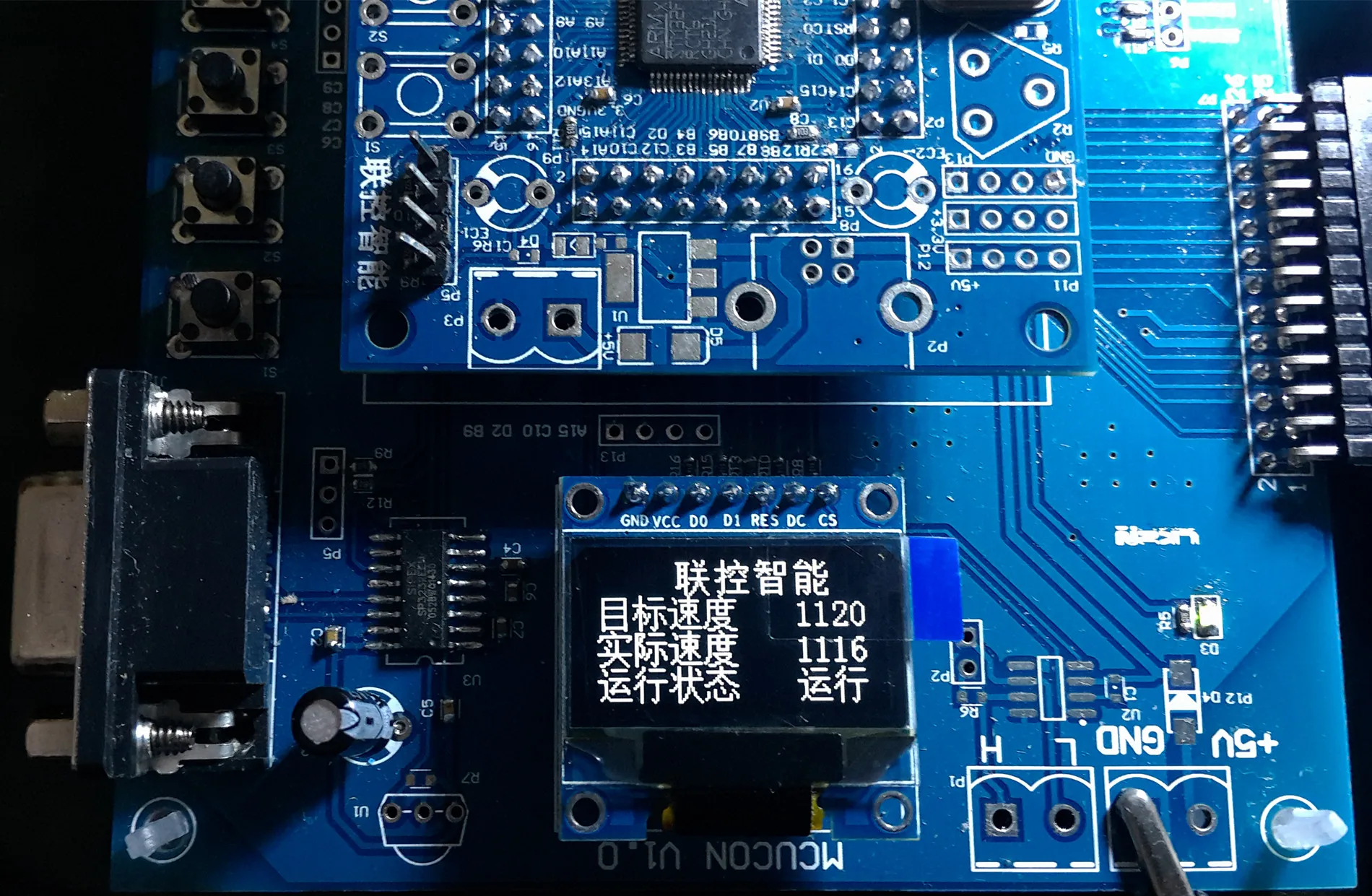
Foc2.0демонстрация (поддержка регулирования скорости нажатия клавиш, безпольное регулирование скорости потенциометра, аналоговый Электромобиль, OLEDMenu дисплей)
Демонстрация вождения квадратной волны:
Безпольное регулирование скорости потенциометра:
Ускорение и замедление работы клавиатуры:
ТРАПЕЦИЕВИДНОЕ ускорение и алгоритм замедления:
Расположение петля алгоритм:
Отображение рисунков:








Защита от напряжения платы привода: устройства от перенапряжения

Демонстрация перелива ведущей пластины, использование нановторого уровня, защита от перегрузки по току, более быстрая защита driveMOSBurn, это важный момент для людей, которые делают разработку водителя.




Фактическое испытание на ускорение скорости и ускорение замедления кольцо положения:


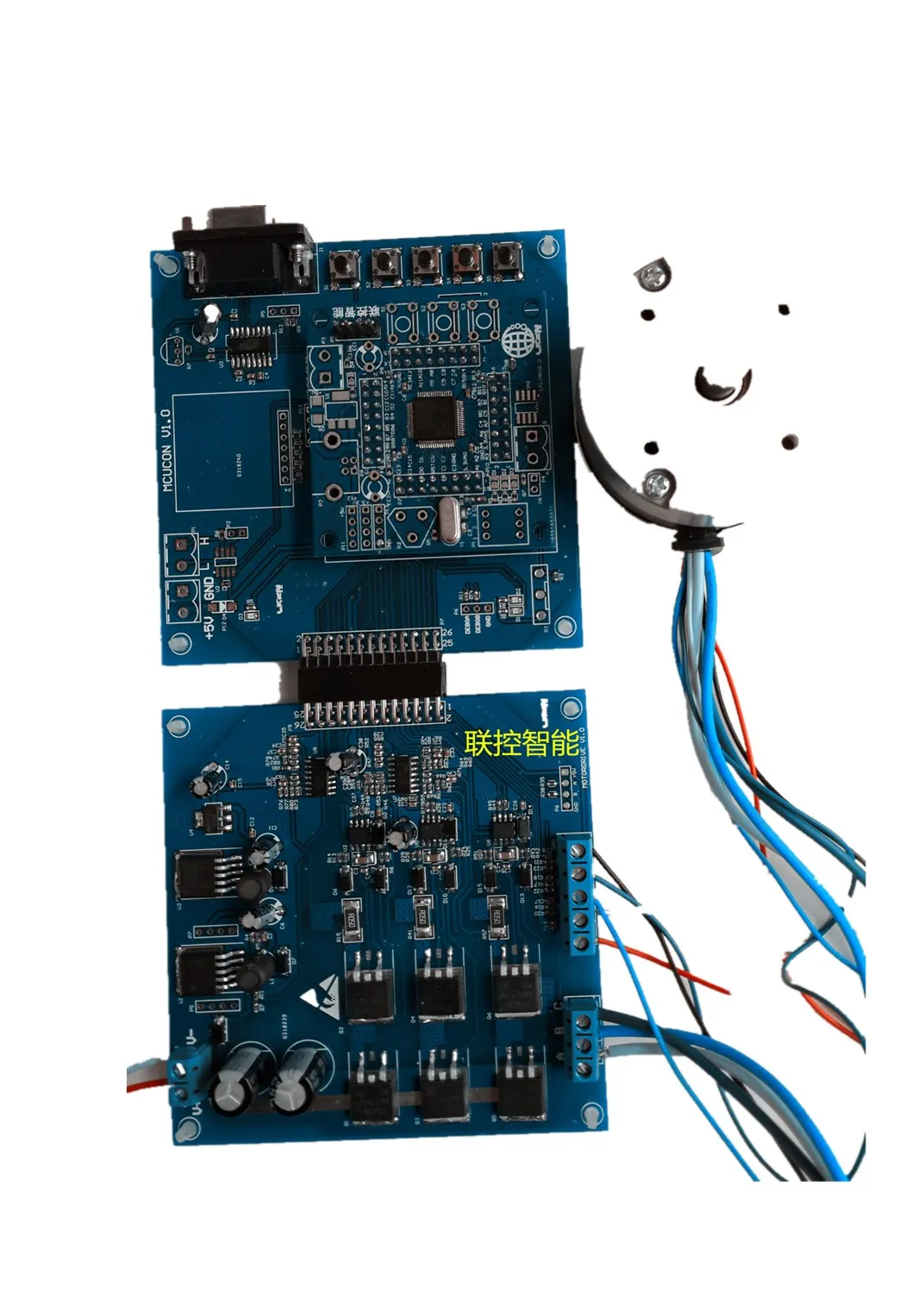
Отгрузочная ведомость:
1. Блок привода двигателя
2. Управление панельБлок
3. Линия последовательного порта usbодин корень
4. Пластина поддержки восемь
5. Схематическая схема водительской платы одна копия
6. STM32 FOC4.2 Holzer процедура набор
7.STM32 FOC4.2 бессенсорная программа набор
8. STM32 FOC4.3 Holzer процедура набор
9. STM32 FOC5.3 Holzer процедура набор
10. STM32 FOC5.3 кодировщик программа набор
11. STM32 FOC5.4 хользер процедура набор
12. STM32 FOC5.4 кодировщик программа набор
13. STM32 FOC5.4 бессенсорная программа набор
14. STM32 FOC2.0Holzer процедура набор (Поддержка ключей и потенциометров)
15. STM32 FOC2.0Sensorless программыКомплект(Поддержка ключей и потенциометров)
16. STM32 квадратная волна клавиатура регулировка скорости набор
17. STM32 потенциометр регулировка скорости набор
18. ТРАПЕЦИЕВИДНОЕ ускорение и алгоритм замедления набор
19. Схема определения местоположения (+ 50 элементов, код отправки для рецензентов) набор
20. Инструкции один экземпляр
21. F0C4.2Library инструкции по использованию одна копия
22. Краткое описание проблем клиентов в разработке бесщеточного приводаОдин экземпляр
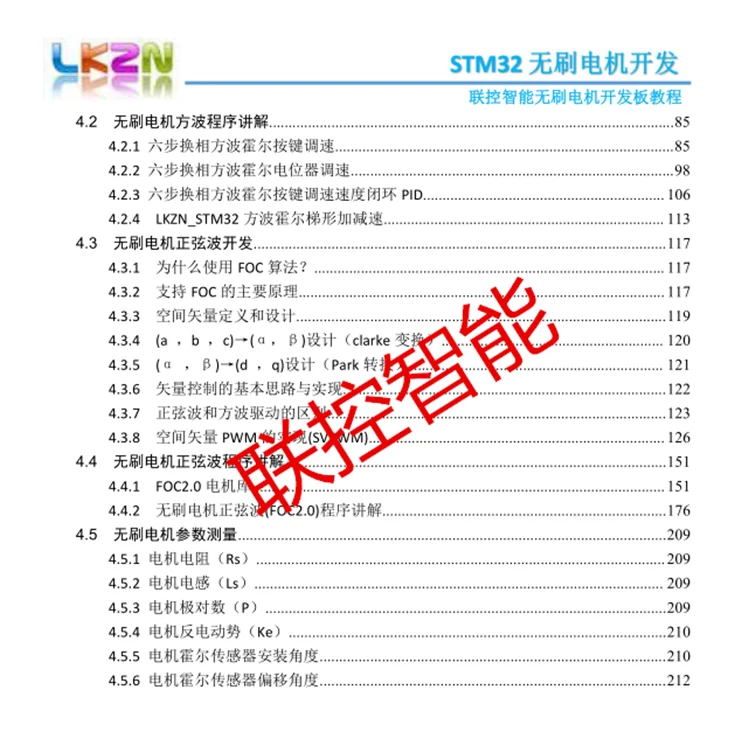
23.Макетная плата, ход интеллектуального бесщеточного двигателя с общим управлениемОдин экземпляр
Эта посылка не включает двигатели.
Комплементарные товары







