





Описание
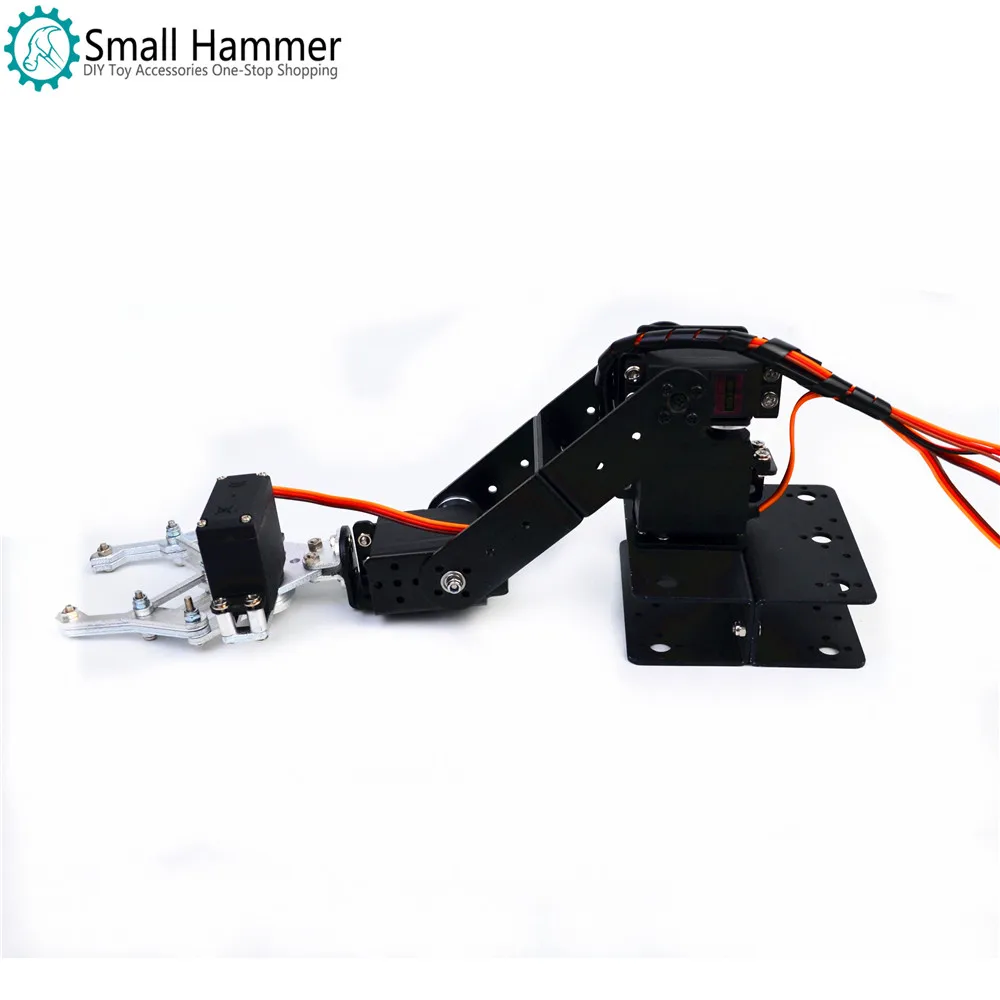
Алюминиевый сплав Arduino 4 DOF манипулятор Кронштейн Рулевого механизма механические лапы DIY части робота
Эта Роботизированная рука является 4-DOF манипулятором, разработанным из нескольких алюминиевых сервоприводов.
Модель продукта: SNAM3900
Общий вес посылка: 550 г
Высота руки: 35,5 см
Параметры одиночного механического захвата:
Рабочее напряжение: 4,8-6 в
Материал Лапы: алюминиевый сплав
Вес лапы: около 68 г (без рулевого механизма)
Максимальный угол открывания лапы: 52 мм
Общая длина лапы: 115 мм (общая самая длинная длина при закрытии лапы)
Общая ширина лапы: 100 мм (максимальная общая ширина при открывании лапы)
MG996 свойства рулевого механизма:
Размер продукта: 40,7*19,9*42,9 мм
Продукт тяга: 15 кг/17 кг/20 кг/25 кгцм (6 V)
Скорость реакции: 0,17 сек/60 градусов (4,8 в без нагрузки) 0,14 сек/60 градусов (6 в без нагрузки)
Рабочее напряжение: 4,8-6 в
Рабочая температура: 0 °C-55 °C
Форма Шестерни: металлическая шестерня
Рабочая мертвая зона: 2us (микросекунды)
Три линии разъема рулевого механизма: желтый-красный сигнал-положительный коричневый-отрицательный
Отгрузочная ведомость:
Металлические детали манипулятора 1 комплект
MG996R рулевой механизм 4
Достаточно установленные винты 1 упак







Характеристики
- Тема
- Фантастика и Фэнтези
- Сертификация
- 3C
- Возрастной диапазон
- Взрослые
- Предупреждение
- ASSEMBLE
- Источник питания
- Electric
- Номер модели
- SNRM3900
